使用Scratch与ROS集成进行教育机器人编程设计与人工智能应用软件开发
在当前教育技术飞速发展的背景下,将可视化编程工具Scratch与机器人操作系统(ROS)结合,为教育机器人编程及人工智能应用软件开发提供了创新途径。本文详细阐述如何利用这两种工具设计并实现教育机器人编程系统,并展示其在人工智能软件开发中的具体应用。
一、Scratch与ROS集成基础
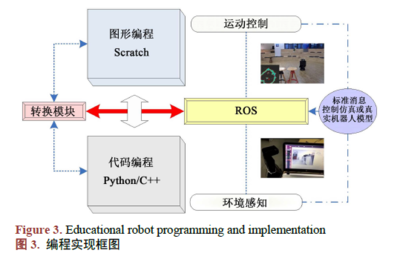
Scratch作为麻省理工学院开发的图形化编程工具,通过拖拽积木块的方式降低了编程门槛,特别适合青少年编程教育。而ROS作为机器人领域的开源操作系统,提供了硬件抽象、设备控制等功能。通过Scratch-ROS桥接器(如ROS2Scratch、Scratch for ROS等),可以实现Scratch对ROS节点的控制,使初学者能够通过可视化编程操作真实的机器人硬件。
二、系统设计与实现步骤
- 环境搭建:首先安装Ubuntu系统及ROS(推荐ROS Noetic或ROS2版本),配置Scratch-ROS桥接环境。
- 硬件集成:连接机器人传感器(如摄像头、超声波、陀螺仪等)与执行器(电机、舵机等),确保ROS能够识别并控制这些设备。
- Scratch编程设计:在Scratch中设计交互界面,通过事件驱动积木块(如“当绿旗被点击”、“当接收到消息”)触发ROS话题发布或服务调用。
- 功能实现:利用Scratch控制机器人完成基本动作(移动、转向)、传感器数据读取(距离检测、图像识别)以及复杂行为(路径规划、避障)。
三、人工智能应用开发实例
- 计算机视觉应用:通过Scratch调用ROS中的OpenCV节点,实现人脸识别、物体跟踪等功能。学生可通过拖拽积木块设置识别阈值、选择检测模型,直观理解AI算法原理。
- 语音交互系统:集成ROS语音识别与合成包,设计语音控制机器人程序。例如,使用Scratch设计“当听到‘前进’命令”时触发机器人移动指令。
- 自主导航开发:结合SLAM技术,在Scratch中设计地图构建与路径规划逻辑,让学生体验自动驾驶的核心技术。
四、教育实践价值与展望
这种集成方案不仅降低了机器人编程的学习曲线,更通过可视化方式揭示了人工智能技术的实现原理。教育者可以基于此设计跨学科课程,融合编程、机器人技术、人工智能等知识点。未来,随着ROS2与Web Scratch的进一步发展,云端编程与实时机器人控制将成为可能,为AI教育提供更广阔的平台。
Scratch与ROS的结合为教育机器人编程与人工智能应用开发提供了强大而友好的工具链。通过这种创新方式,学生能够在趣味实践中掌握前沿技术,为培养人工智能时代创新人才奠定坚实基础。
如若转载,请注明出处:http://www.kloiyy.com/product/8.html
更新时间:2026-03-01 06:00:15